Thomas Buhrmann has been working on a model of arm movement that, contrary to widespread assumptions, can compensate for the complex and dynamic inter-joint torques without the need for a central control using internal models. This work has been just published and can be accessed for free:
Buhrmann T and Di Paolo EA (2014) Spinal circuits can accommodate interaction torques during multijoint limb movements. Front. Comput. Neurosci. 8:144. doi: 10.3389/fncom.2014.00144.
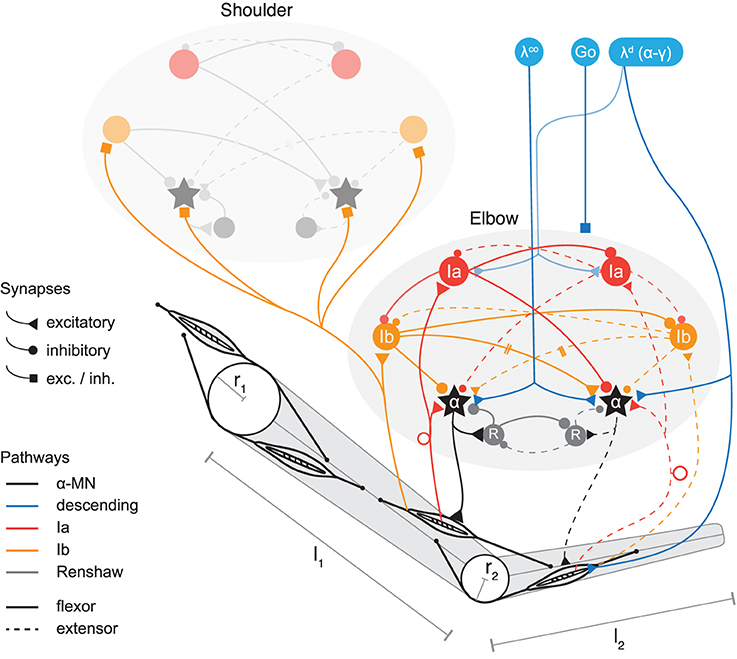
The model shows how a combination of the musculo-skeletal complex non-linear dynamics and spinal control circuits can produce smooth arm movements where the torque produced in one joint due to movement around the other is actively compensated without the need of a central control by the brain. It lends support to the plausibility of alternative hypotheses of motor control, such as the equilibrium-point hypothesis, that do not rely on internal representations or models.

Very interesting perspective, do you think that such a system can be faster than one based on an internal representation?