Video of talk given in February 2022 for the Constructivist Meet up Series 2.
Tag: embodiment
Enactive sense of agency
A new open access paper discussing the enactive notion of sensorimotor agency and how it helps explain the phenomenology of the sense of agency in a non-representational manner.
Buhrmann, T., and Di Paolo, E. (2015) The sense of agency – a phenomenological consequence of enacting sensorimotor schemes, Phenomenology and the Cognitive Sciences, doi: 10.1007/s11097-015-9446-7. (online first).
Abstract. The sensorimotor approach to perception addresses various aspects of perceptual experience, but not the subjectivity of intentional action. Conversely, the problem that current accounts of the sense of agency deal with is primarily one of subjectivity. But the proposed models, based on internal signal comparisons, arguably fail to make the transition from subpersonal computations to personal experience. In this paper we suggest an alternative direction towards explaining the sense of agency by braiding three theoretical strands: a world-involving, dynamical interpretation of the sensorimotor approach, an enactive description of sensorimotor agency as contrasted with organic agency in general, and a dynamical theory of equilibration within and between sensorimotor schemes. On this new account, the sense of oneself as the author of one’s own actions corresponds to what we experience during the ongoing adventure of establishing, losing, and re-establishing meaningful interactions with the world. The meaningful relation between agent and world is given by the precarious constitution of sensorimotor agency as a self-asserting network of schemes and dispositions. Acts are owned as they adaptively assert the constitution of the agent. Thus, awareness for different aspects of agency experience, such as the initiation of action, the effort exerted in controlling it, or the achievement of the desired effect, can be accounted for by processes involved in maintaining the sensorimotor organization that enables these interactions with the world. We discuss these processes in detail from a non-representational, dynamical perspective and show how they cohere with the personal experience of agency.
Keywords Enactive cognitive science. Agency. Sense of agency. Sensorimotor contingencies. Equilibration. Metastability
Reports for the eSMCs project (2011-2014)
The project eSMCs: Extending SensoriMotor Contingencies to Cognition (1/2011-12/2014, EU FP7-ICT-2009-6 no: 270212) has recently come to an end. You can find more information on the project website. Here I include the reports delivered by our research team. They summarize what was work-in-progress at the time of writing, most of which was later published. But also some bits that have not yet been published.
Barandiaran, X., Buhrmann, T. and Di Paolo, E. (2012). Deliverable D1.1: Interim report on eSMCs and embodiment.
Barandiaran, X., Beaton, M., Buhrmann, T. and Di Paolo, E. (2013). Deliverable D1.2: eSMCs and embodied cognition.
Beaton, M., Barandiaran, X., Buhrmann, T. and Di Paolo, E. (2014). Deliverable D1.5: Cognitive organisation for sustaining eSMCs.
Buhrmann, T., Di Paolo, E., Barandiaran, X., De Jaegher, H. (2015). Deliverable D1.6: Agency and eSMCs.
Beaton, M. and Di Paolo, E. (2015). Deliverable D1.7 Virtual Actions and eSMCs.
Interview in Revue de Éducation Physique et Sport
A conversation about enaction, sports and embodiment with sport science researchers for issue 362 of the Revue de Éducation Physique et Sport. (Click image for full pdf).
Multijoint movement without internal models
Thomas Buhrmann has been working on a model of arm movement that, contrary to widespread assumptions, can compensate for the complex and dynamic inter-joint torques without the need for a central control using internal models. This work has been just published and can be accessed for free:
Buhrmann T and Di Paolo EA (2014) Spinal circuits can accommodate interaction torques during multijoint limb movements. Front. Comput. Neurosci. 8:144. doi: 10.3389/fncom.2014.00144.
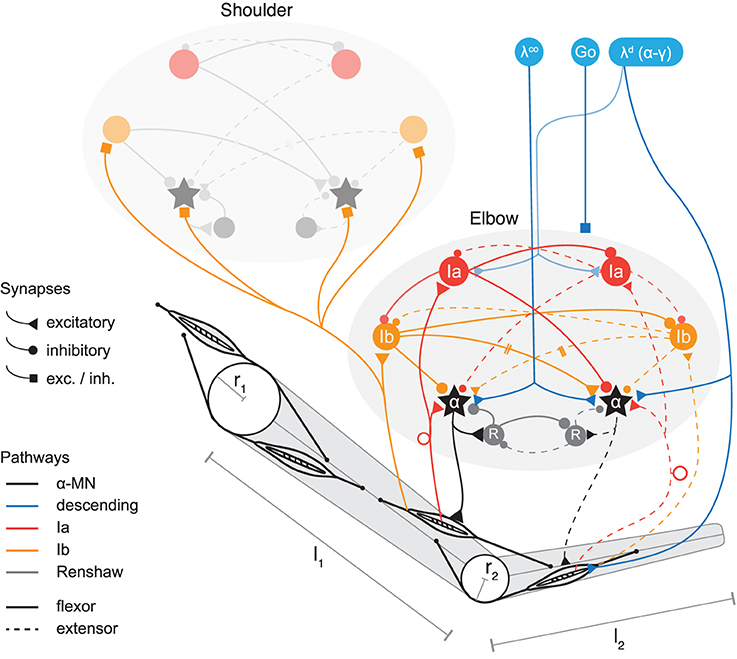
The model shows how a combination of the musculo-skeletal complex non-linear dynamics and spinal control circuits can produce smooth arm movements where the torque produced in one joint due to movement around the other is actively compensated without the need of a central control by the brain. It lends support to the plausibility of alternative hypotheses of motor control, such as the equilibrium-point hypothesis, that do not rely on internal representations or models.
